Rengöringsrobot städar spannmålssilon
En robot som kan städa stora spannmålssilon. Det är resultatet av en doktorsavhandling i reglerteknik vid Örebro universitet.
– På det sättet kan människor undkomma en arbetsmiljö som medför en risk för både deras hälsa och säkerhet, säger Kinan Dandan.
Arbetsförhållanden vid rengöring och sanering av spannmålssilon är ofta extrema och kräver att de som jobbar bär täta kläder, hjälmar, andningsskydd och öronskydd. Silon ska rengöras ofta och alltid efter att en silo är helt tömd enligt EU-regler för hygien och livsmedelskvalitet.
– Det finns ett ökat samhällsbehov för att människor ska slippa utsättas för den riskabla miljön, säger Kinan Dandan, doktorand vid Centrum för tillämpade autonoma sensorsystem vid Örebro universitet.
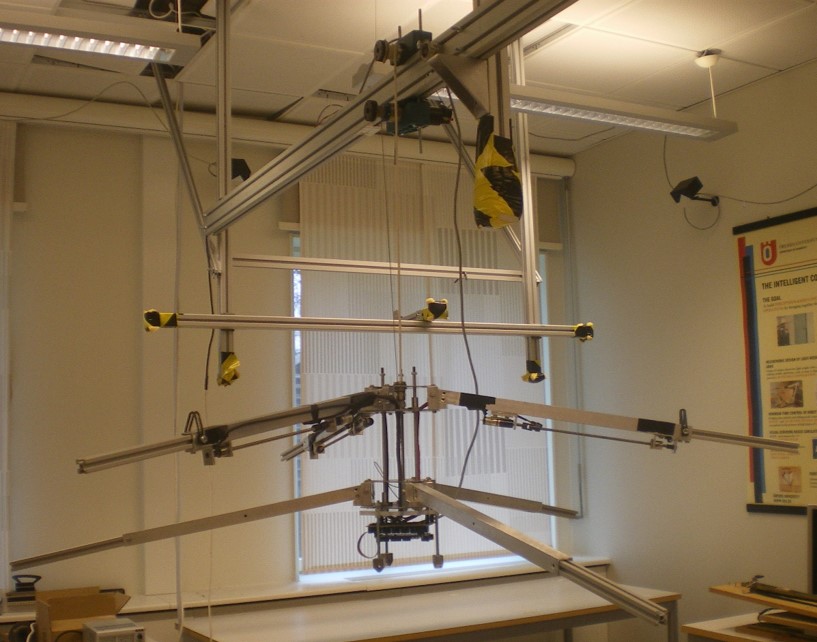
En paraplyliknande robot
I sin avhandling presenterar Kinan Dandan en städrobot – SIRO – som kan liknas vid ett paraply. Den har flera rengöringsarmar och är hopfällbar.
– Robotens huvudfunktioner är att bära rengöringsverktygen som är luftstrålar och stabilisera dessa under arbetsprocessen. Den är vikbar för att kunna passera den smala öppningen till silon på taket och kan vecklas ut för att kunna städa i ett stort utrymme, säger han.
Tack vare robotens krypande rörelser efter väggar och rotationen av rengöringsverktygen nås hela ytan i silon som behöver städas.
– SIRO är designad för att uppnå en maximal prestanda för rimlig kostnad, säger Kinan Dandan.
Kontrolleras av två system
Städroboten kontrolleras av två olika system. Ett finns på själva roboten och det andra på en stödenhet utanför silon.
– Algoritmerna för alla tre robotuppgifterna presenteras i studien – placering av roboten i silon, hålla roboten i vertikal position och uppnå vertikala kryprörelser.
Än så länge fungerar roboten SIRO inuti cylindriska utrymmen med en diameter mellan fem och åtta meter.
– En fullskalig prototyp behöver byggas och testas i en rad olika experiment. Framtidens version av SIRO-roboten är autonom och operatörens jobb blir att placera den i silon. Därefter ska roboten kunna bestämma sin position själv och starta rengöringsprocessen, säger Kinan Dandan.
Avhandling:
Enabling Surface Cleaning Robot for Large Food Silo
Kontakt:
Kinan Dandan, Centrum för tillämpade autonoma sensorsystem, Örebro universitet, kinan.Dandan@knightec.se